Degradation-Aware LiDAR-Thermal-Inertial SLAM
A RA-L paper and open-source SLAM framework that adaptively fuses LiDAR, thermal imagery, and inertial measurements for robust state estimation in smoke, darkness, and other perception-degraded environments.
Overview
A RA-L paper and open-source SLAM framework that adaptively fuses LiDAR, thermal imagery, and inertial measurements for robust state estimation in smoke, darkness, and other perception-degraded environments.
Details
Why LiDAR and Thermal Matter
LiDAR is often the most dependable sensing backbone for mobile robot SLAM because it provides direct metric geometry and works without ambient light. In disaster-relief environments, however, even LiDAR can lose reliability: smoke, dust, and fog scatter optical measurements, while long corridors, open areas, and self-similar spaces reduce the geometric constraints needed for stable scan matching.
Thermal infrared sensing complements this failure mode. Instead of depending on visible texture or clean geometric returns, it observes heat radiation that can remain useful in darkness and smoke. The tradeoff is that thermal images are often low-contrast, noisy, and difficult for data association, so thermal sensing is not a drop-in replacement for LiDAR.
DaLiTI is built around this complementarity. LiDAR should dominate when geometric structure is reliable; thermal observations should carry more influence when smoke or darkness makes optical perception unstable. Degradation awareness is therefore the mechanism that decides when each modality should be trusted, rather than assuming every sensor is equally reliable at every moment.

Adaptive LiDAR-Thermal-Inertial Fusion
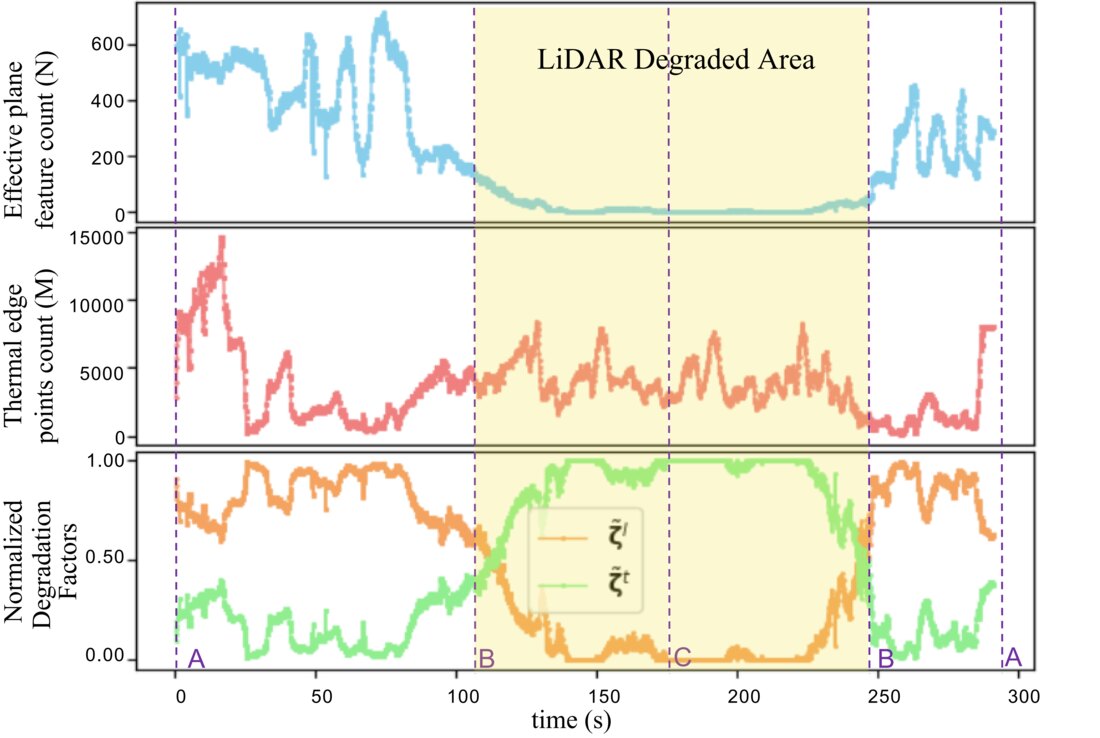
DaLiTI uses an iterated error-state Kalman filter to loosely integrate IMU propagation, LiDAR measurements, and thermal-inertial odometry. The loose structure is deliberate: it keeps the LiDAR and thermal streams separable enough to down-weight a degraded source before its failure propagates through the whole estimator.
The key module is a degradation quantizer. For LiDAR, quality is estimated from the effective plane-feature density. For thermal imagery, quality is estimated from the density of usable thermal edge features. The normalized degradation factors then act as adaptive weights in the IESKF update: LiDAR dominates in geometrically reliable scenes, while thermal observations receive more weight when smoke or other degradation reduces LiDAR reliability.
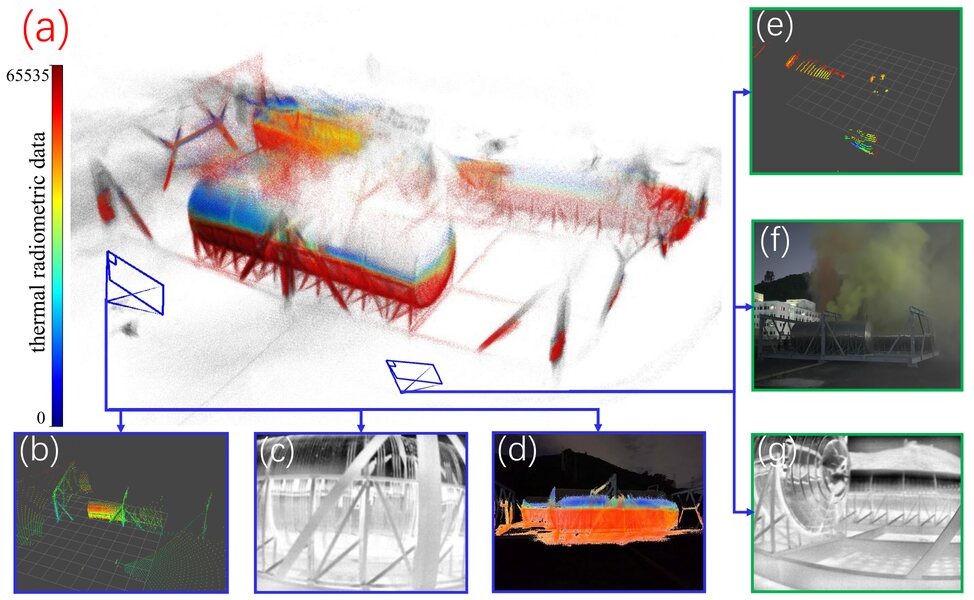
Thermal Features with LiDAR-Aided Depth
The thermal branch follows the edge-based thermal odometry idea from ETIO: raw thermal images are converted into edge images so that data association depends on thermal-radiation boundaries rather than low-contrast intensity patches. LiDAR is then used to provide depth for thermal edge features when the LiDAR quality is high enough.
This cross-modality association avoids blindly averaging nearby projected LiDAR points around an image edge, where foreground and background points often mix. Instead, the method filters background points and only trusts LiDAR-aided depth when the degradation factor indicates that LiDAR perception is reliable.
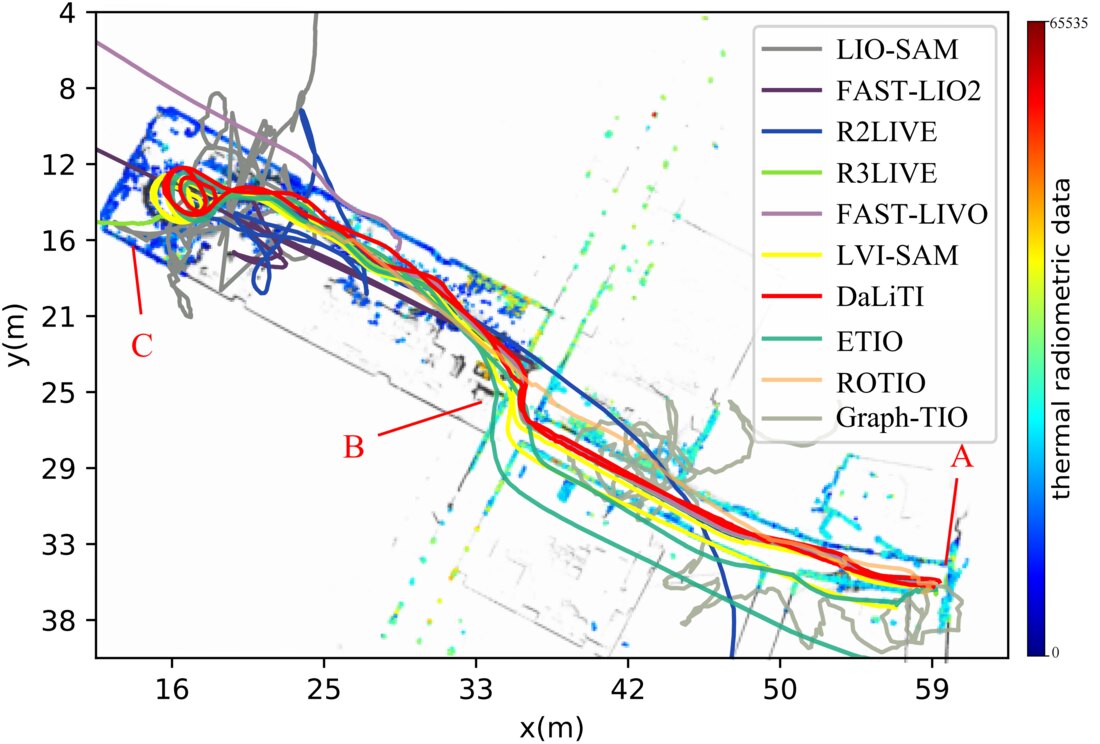
Fire and Chemical-Plant Experiments
The system was evaluated on a wheeled robot with an Ouster OS1-64 LiDAR, Xenics Gobi+ 640 thermal camera, Xsens MTi-G-710 IMU, and RGB-D camera. Experiments ran on an Intel i7-11800H laptop without GPU acceleration.
In the indoor fire scenario, the robot traversed a textureless corridor, entered a dark smoke-filled warehouse, and returned along an approximately 110 m trajectory. DaLiTI achieved less than 0.1 m accumulated drift, while most comparison methods failed or accumulated much larger error inside the smoke-filled area.
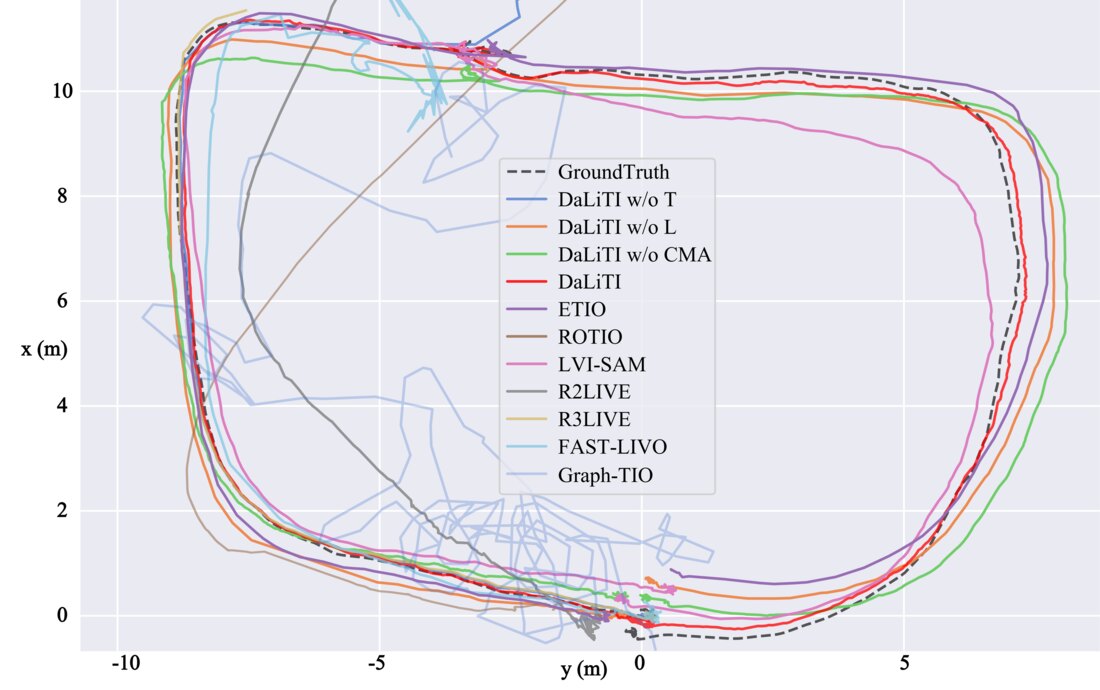
For the outdoor chemical-plant leakage scenario, the robot moved at night around a smoke-obscured water tank over a 60 m trajectory. The complete DaLiTI system achieved the best trajectory accuracy among the evaluated variants and baselines, showing the benefit of using thermal observations without forcing unreliable measurements into the estimator.
Open-Source Release
The implementation is released as an open-source contribution through HITSZ nROS-Lab. The project connects directly to the published RA-L paper and the public GitHub repository, keeping both the research-paper context and the live open-source status visible.