 Thermal Dense Mapping
Thermal Dense Mapping
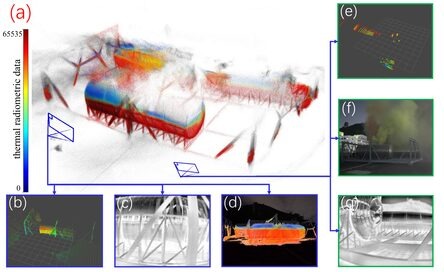
Thermal Dense Mapping with Odometry-Guided Foundation Depth Estimation
Fireground-oriented dense mapping from thermal imagery, built on a thermal-radar-inertial SLAM backbone for smoke, water spray, fire, darkness, and other perception-degraded environments. The current prototype uses odometry-guided Depth Anything 3 inference and reaches about 0.5 Hz online dense reconstruction on an RTX 5090 laptop.